Robotics - Chapter 1. Introduction - 1
산업용 로봇의 구조
1. Manipulator
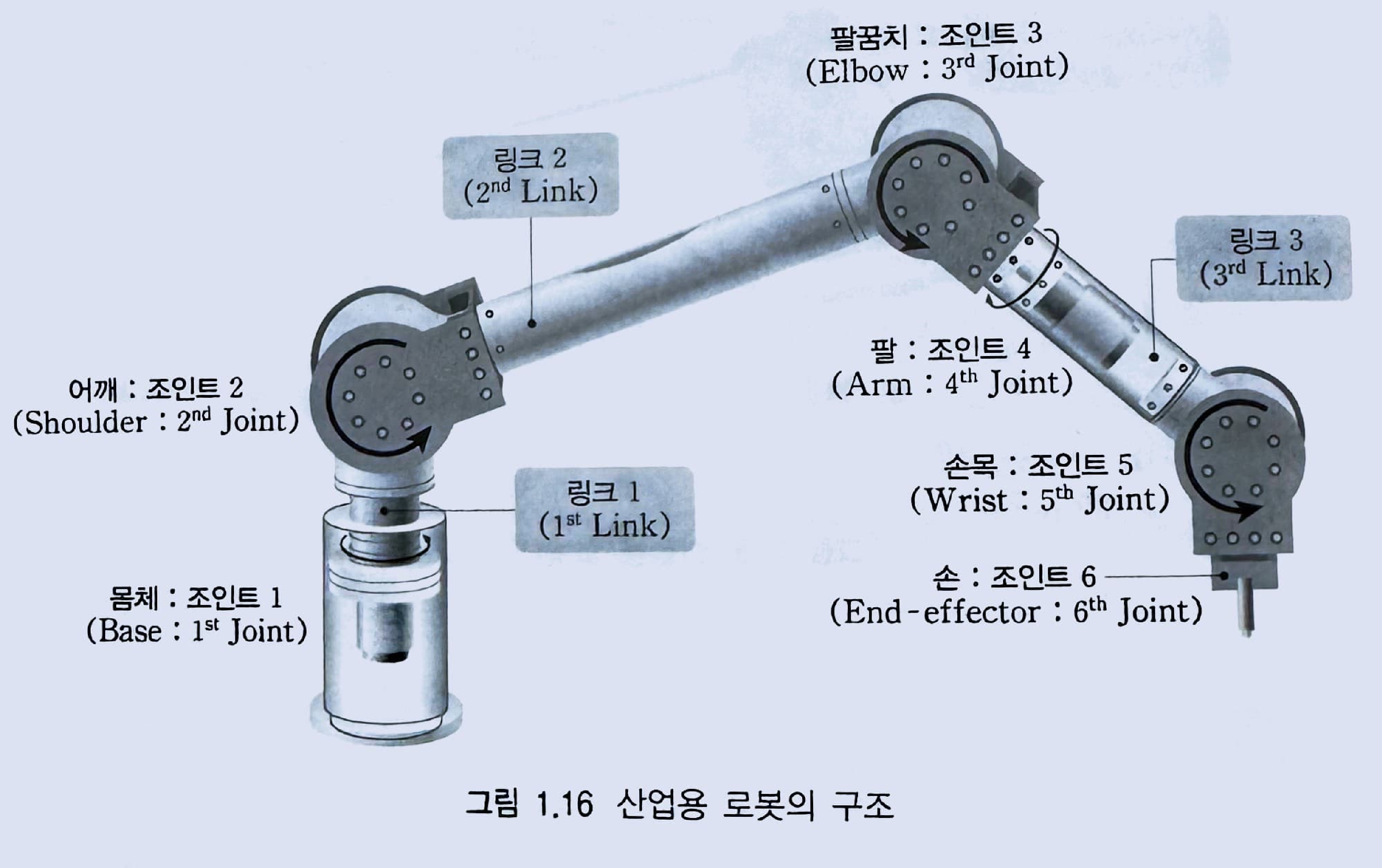
로봇 본체를 의미하며 Base, Shoulder, Elbow, Arm, Wrist, End-effector로 구성된다. 각 부분은 Link와 Joint에 의해서 서로 연결된다. Link는 사람의 뼈대와 같은 관절과 관절을 연결해주는 Rigid body를 의미한다.
몸체를 이루는 Base는 몸통과 수평 회전을 할 수 있는 Joint 1으로 구성되며, manipulator 전체의 지지대 역할을 한다.
Shoulder는 수직 회전을 할 수 있는 Joint 2로 구성되고, Base와 Link 1에 의해 연결된다.
Elbow는 수직 회전을 할 수 있는 Joint 3로 구성되며 사람의 팔꿈치와 같은 역할을 수행한다. Shoulder와 Link 2에 의해 연결된다. 반대편에 연결되어 있는 Link3는 Elbow에서 Joint 4가 추가되어 사람의 팔이 작은 범위에서 회전할 수 있듯이 수평 회전 운동이 가능하도록 구성된다.
Shoulder부터 Wrist 직전 부분까지 통칭하여 Arm이라 지칭한다.
Wrist는 수직 회전 운동을 할 수 있는 Joint 5를 포함하며, End-effector와 맞닿아 있다.
End-effector는 Wrist와 맞닿아 수평 회전 운동을 할 수 있는 Joint 6를 포함한다.
Joint로 연결된 두 부분이 움직이는 상대적인 방향에 따라 수평/수직 회전 운동이 정해진다.
2. Controller
로봇의 Manipulator는 자체적으로는 움직일 수 없으며, 로봇을 움직이기 위해서는 로봇 내부에 관절을 구성하고 있는 Actuator를 움직이도록 전기적 신호로 명령을 전송해야 한다. 사용자가 지시하는 대로 로봇이 움직일 수 있도록 하기 위해서는 Joint가 유효한 작동 범위 내에서 움직일 수 있는 모터 제어 명령을 내려서 사용자가 원하는 동작을 수행할 수 있도록 해야한다.
Controller는 사용자의 명령을 해석하고 이를 로봇이 움직일 수 있는 모터 제어 신호로 변경하는 역할을 한다. Controller의 내부는 각 Joint를 구성하는 모터의 동력과 제어 신호 전달에 필요한 전자 장치들로 구성되어 있다.
3. Teaching pendant
Teaching pendant는 사용자가 로봇의 작업을 지시할 수 있는 사용자 인터페이스이다. 사용자는 Teaching pendant를 이용해서 로봇이 다양한 작업을 수행할 수 있도록 각종 파라미터를 설정할 수 있으며, 로봇의 모든 동작을 교시할 수 있다.
로봇의 구동장치
로봇 관절을 구성하는 Actuator는 동력 전달 방식에 따라 전기식, 유압식 및 공압식으로 구분된다.
| 구분 | 전기 | 유압 | 공압 |
|---|---|---|---|
| 구조 | 간단 | 복잡 | 복잡 |
| 가격 | 저가 | 고가 | 중가 |
| 출력 | 소출력 | 대출력 | 고출력 |
| 발열 | 약간 정도 | 큼 | 없음 |
| 부하 안정성 | 과부하에 민감 | 과부하에 강인 | 과부하에 매우 강인 |
| 응답성 | 보통~상 | 매우 좋음 | 나쁨 |
| 정확성 | 높음 | 보통 | 낮음 |
| 반복성 | 좋음 | 좋음 | 나쁨 |
Electric Actuator에 대한 자세한 설명은 다음 포스트[Introduction - 2 (Electric Actuator)]에 설명되어 있다.
작업 영역과 형상에 의한 로봇의 분류
1. Cartesian coordinate robot
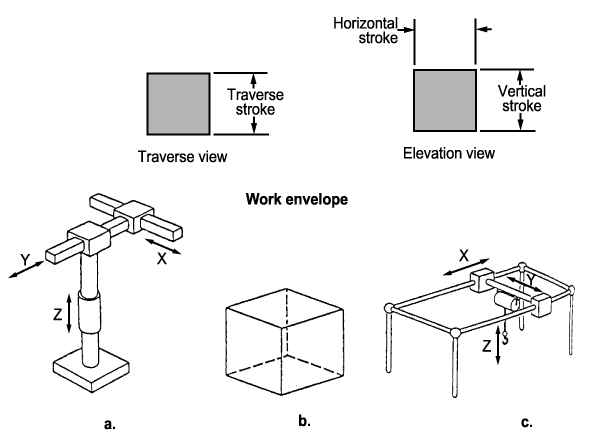
직교 좌표 로봇은 X, Y, Z 각 축을 따라 직선 운동을 할 수 있는 로봇이다. 각 축이 상호 독립인 직각좌표를 이용하기 때문에 로봇의 각 축 운동 방향 또한 독립이다.
2. Cyclindrical coordinate robot
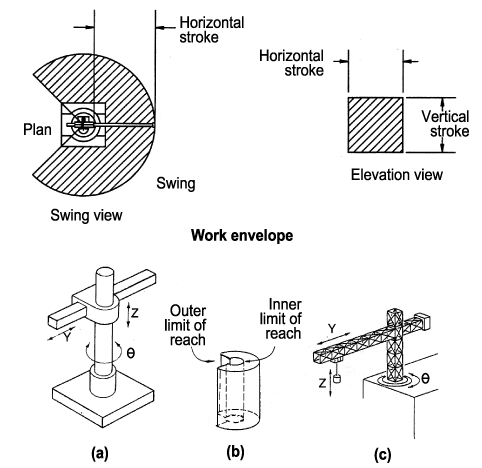
원통 좌표 로봇은 2개의 직선 운동과 1개의 회전 운동을 가지는 로봇이다. 상하 직선 운동은 Z축에 의해 발생하고, 이 축 상에 연결된 로봇의 Base는 회전 운동을 할 수 있게 되어있다.
3. Horizontal articulated robot
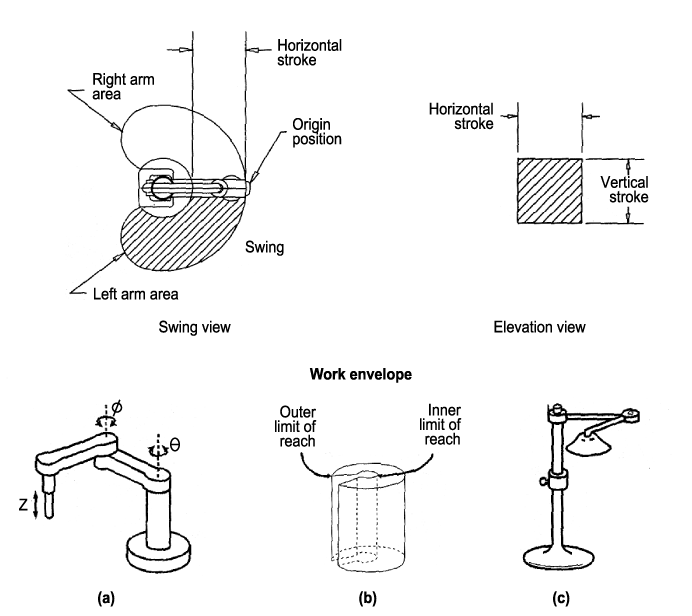
수평 다관절 로봇은 일반적으로 1개의 수직 운동을 할 수 있는 관절과 수평 회전 운동을 수행할 수 있는 2개의 관절을 이용한다.
4. Vertical articulated robot
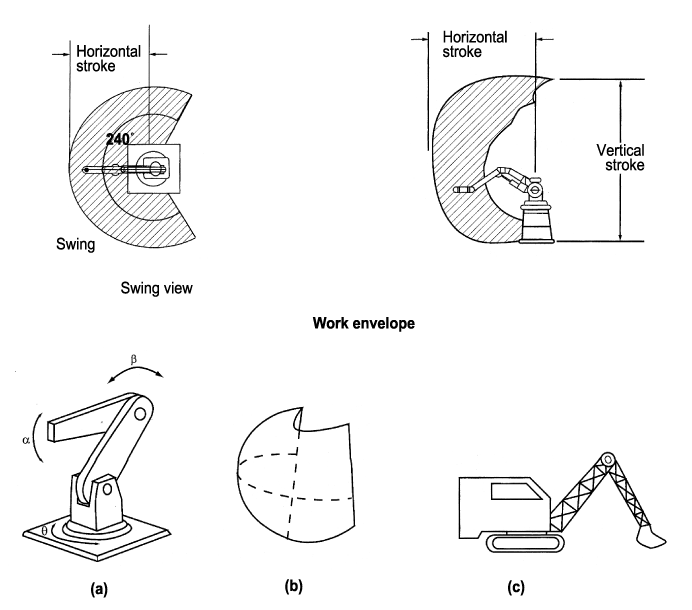
수직 다관절 로봇은 3개의 회전 관절을 통해서 로봇의 Wrist 부분이 로봇 작업 공간상의 특정 지점에 도달할 수 있는 구조를 가지고 있다. 산업용 로봇에서 Manipulator라고 지칭된다.