Robotics - Chapter 1. Introduction - 2 (Electric Actuator)
Electric Actuator
1. DC motor
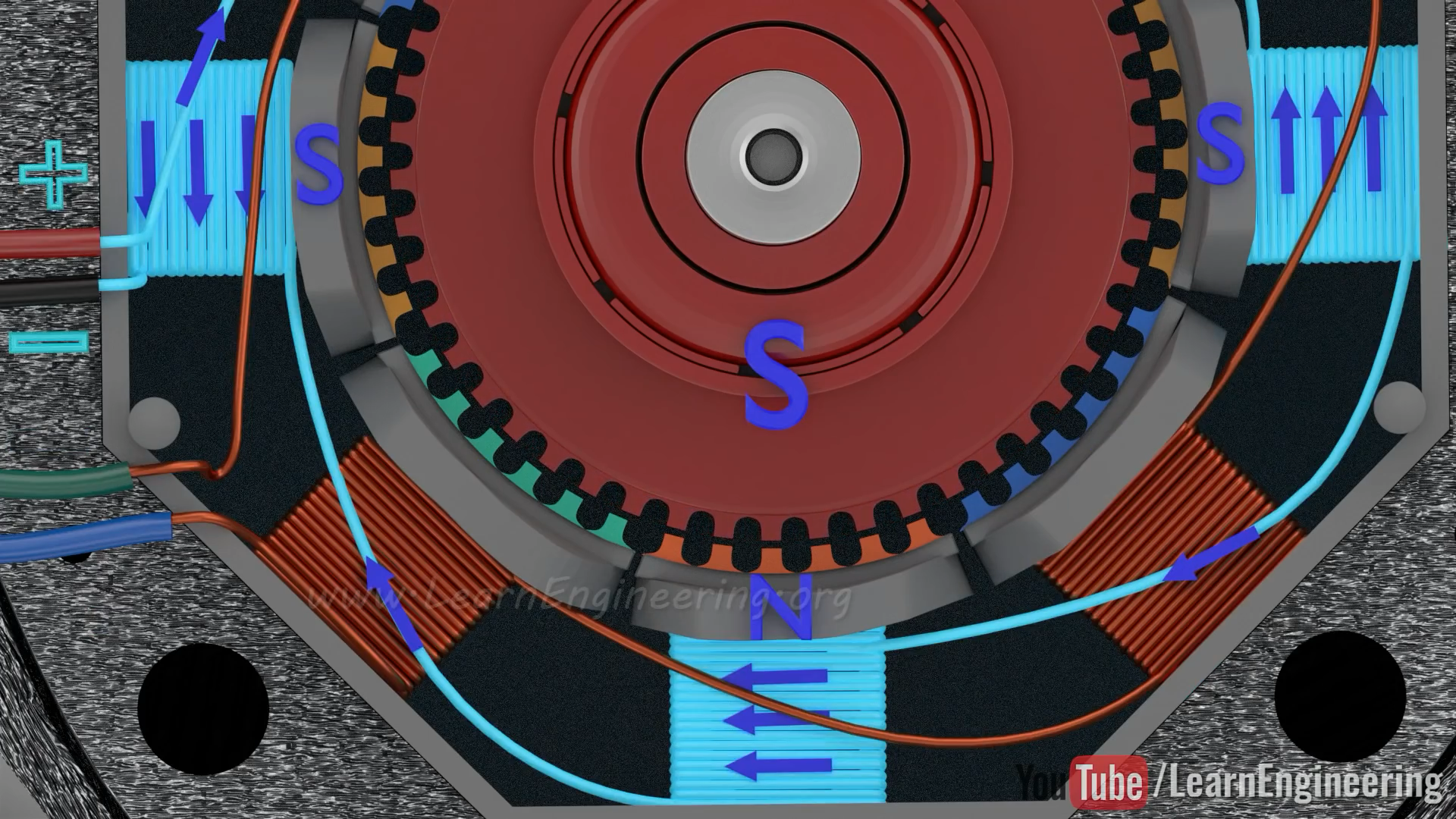
DC 모터는 직류 전원을 사용하여 기계적 에너지를 생성하는 장치이다.
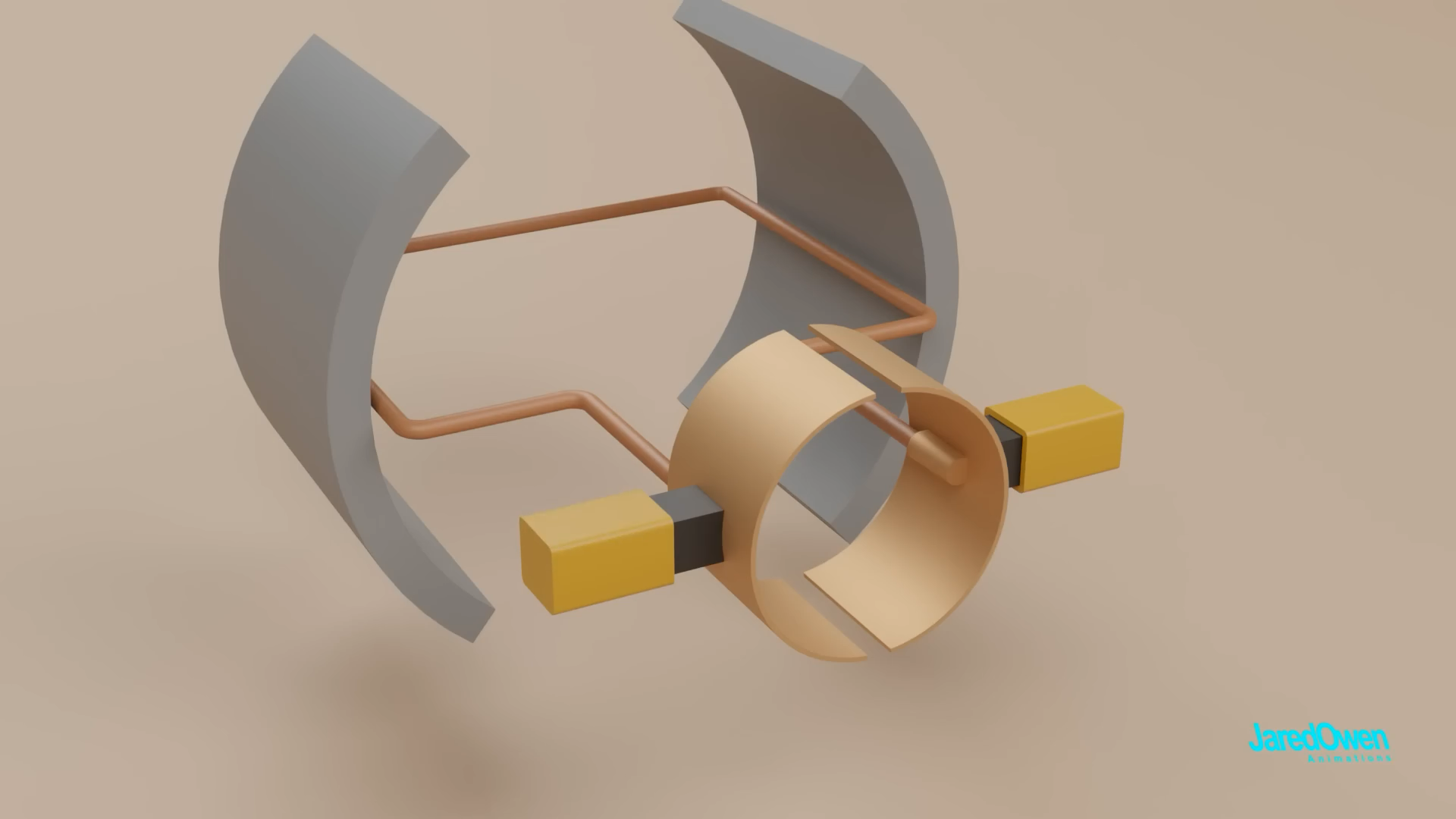
위 그림에서 회색 부분이 Stator로 고정된 자석으로 이루어져 있으며, 한쪽이 N극 다른 한쪽이 S극을 가진다. 구리색 선으로 이루어진 부분은 Armature로 실제로는 코일이 감어져있고, 전류가 흘러서 자기장을 형성하게 된다. Armature와 Stator의 자기장의 상호작용으로 인해 Armature가 회전하게 된다. 구리색 원형 부분은 Commutator로 Armature와 함께 회전하는데, segment로 나누어져있어 주기적으로 Armature에 흐르는 전류 방향을 바꿔준다. 그리고 Commutator 양쪽에 붙어있는 부분은 Brush로 전류를 공급해주며 Stator와 마찬가지로 회전하지 않는다.
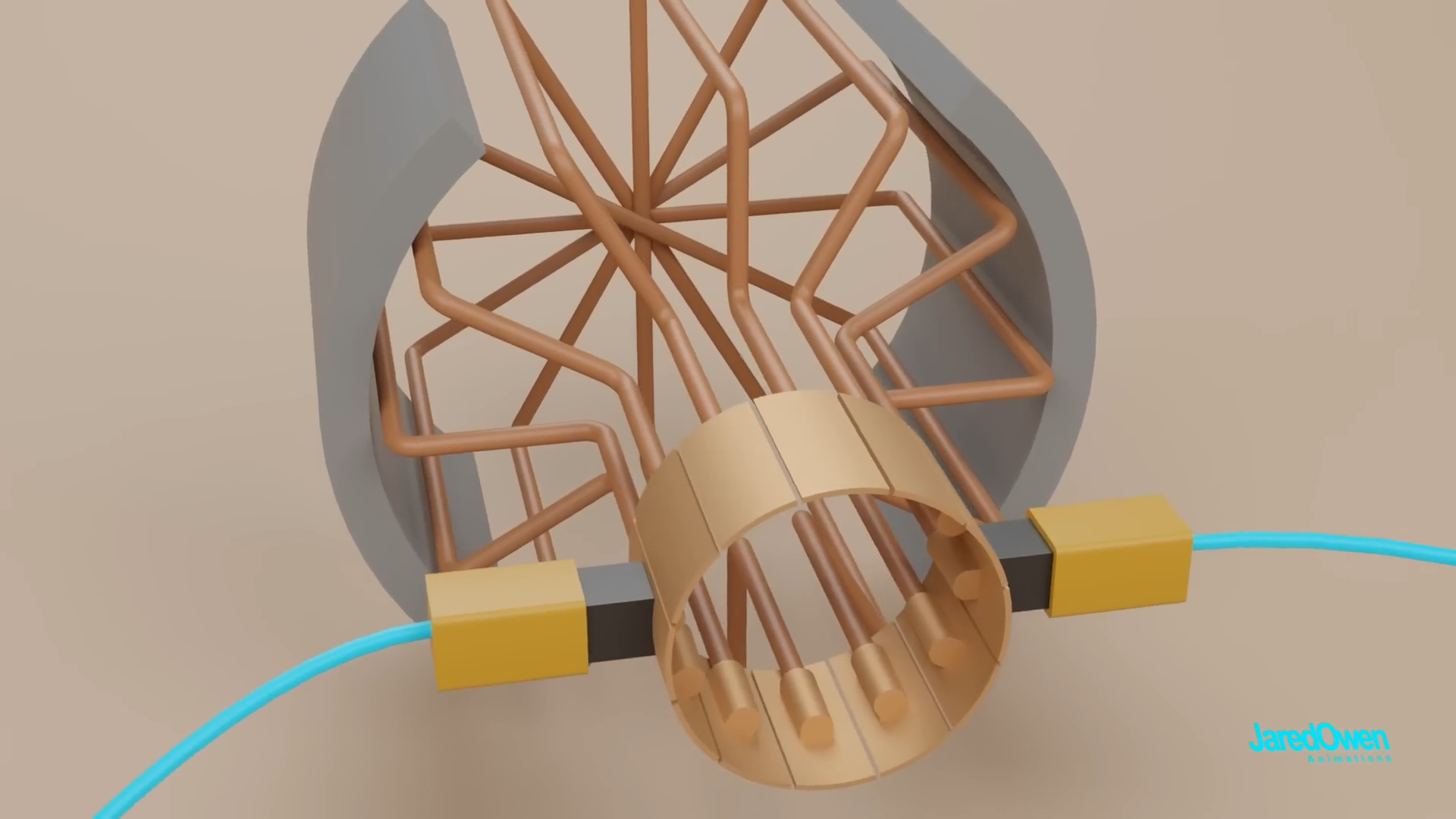
Commutator의 segment가 2개일 경우 빈 부분에서 Armature가 회전하지 않는 문제가 발생할 수 있다. 그래서 실제로는 위와 같이 segment를 많이 나눠서 일정한 속도로 회전할 수 있도록 만든다.
2. Stepper motor
Stepper 모터는 회전을 일정한 각도로 나누어 미리 정해진 step 단위로 움직이며, 각 step은 고정된 각도의 회전에 해당한다.
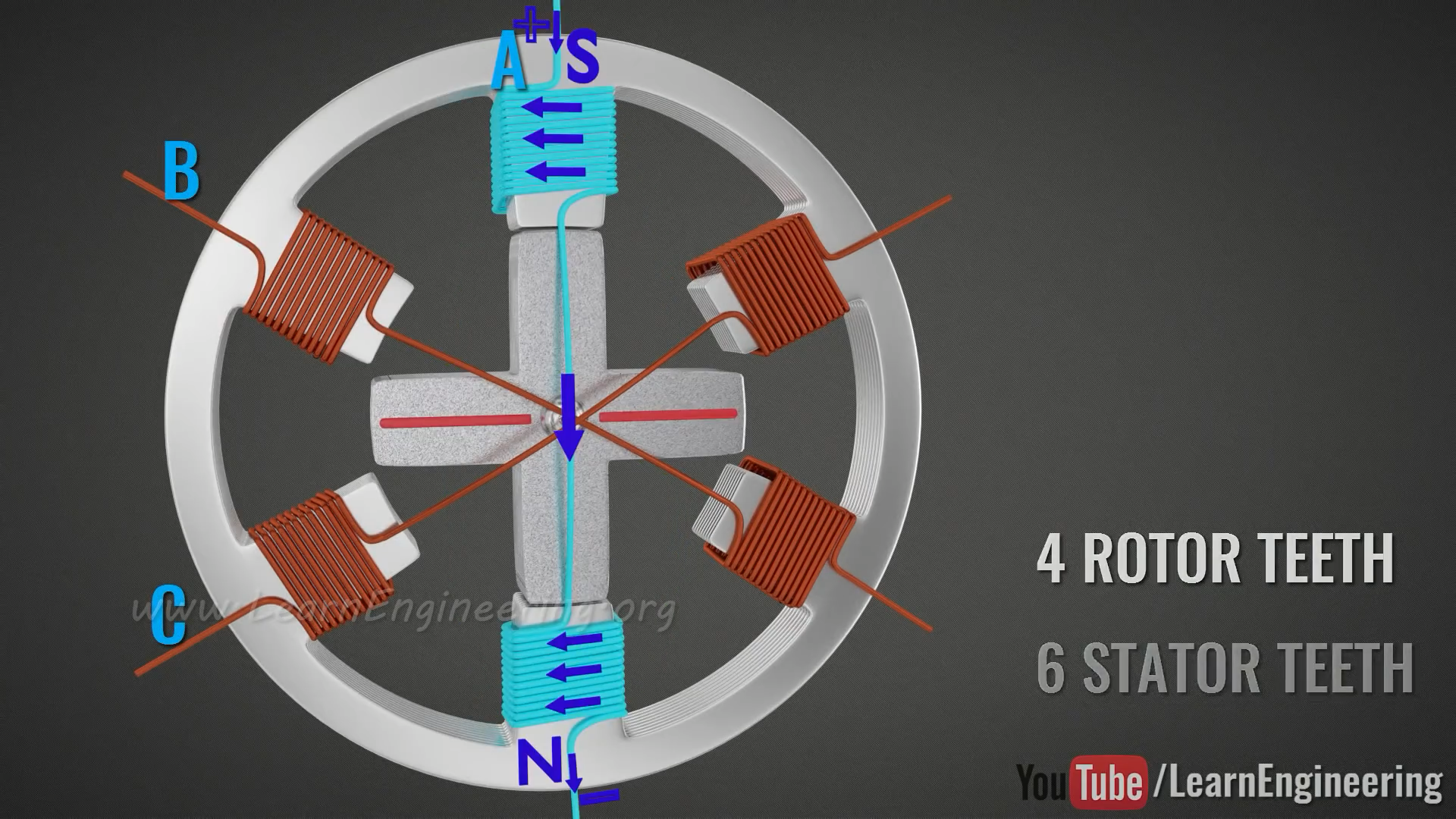
위 그림에서는 6개의 Stator teeth와 4개의 Rotor teeth로 구성되어 있는데, 특정 Stator teeth에 감아진 코일(A)에 전류를 흘려보내 자기장을 형성하고 이 자기장에 철로 이루어진 Rotor가 정렬된다.
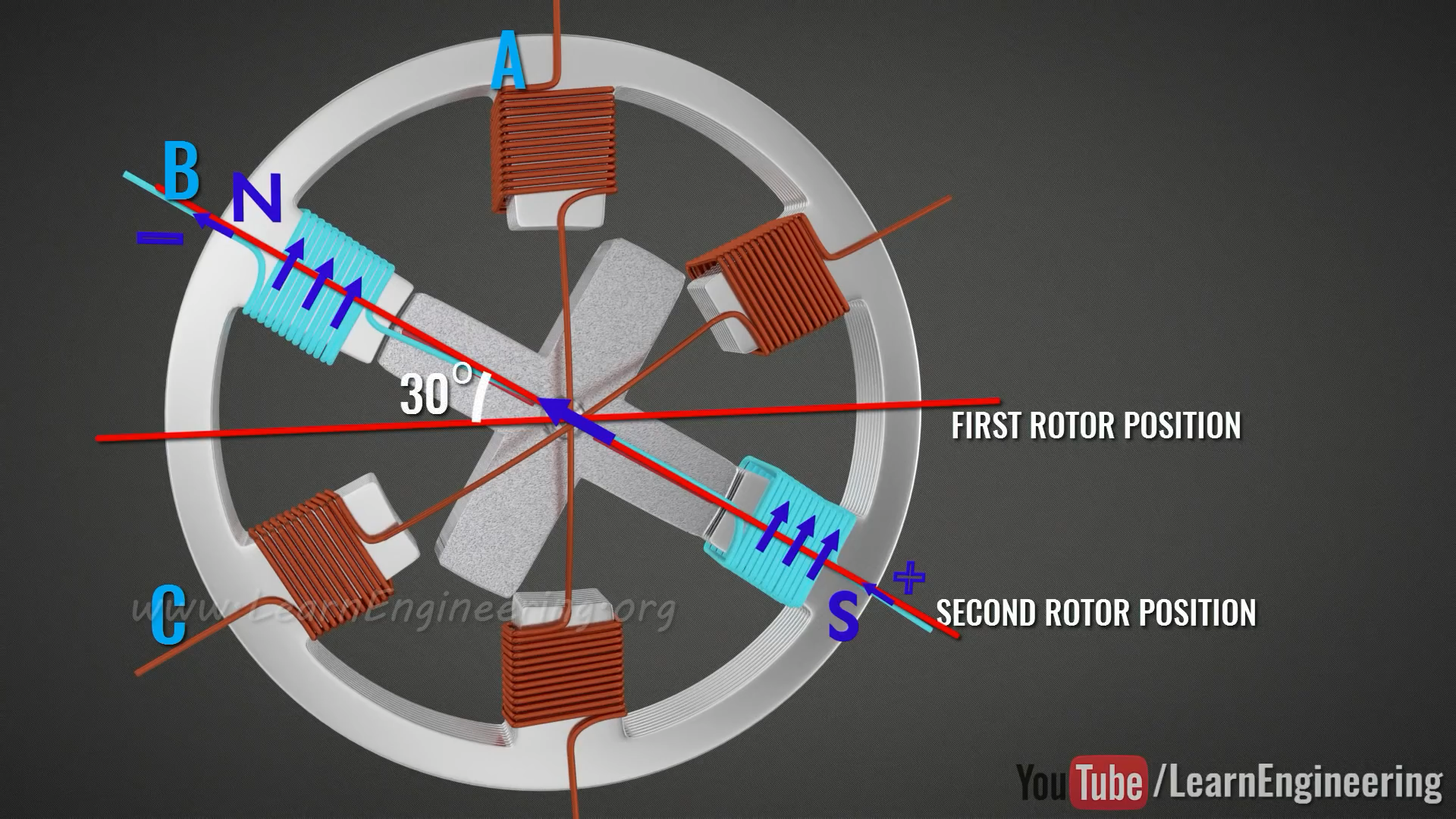
그리고 다음 Stator teeth의 코일(B)에 전류를 흘려보내 해당 Stator teeth에 맞게 정렬된다. 따라서 각 step마다 Rotor가 $30 ^\circ$씩 회전하게 된다.
위 예시에서 A에는 아래 방향으로 전류를 흘려주고 B에는 위 방향으로 전류를 흘려 주었는데, 내 생각에는 Rotor를 시계 방향으로 회전하도록 만들기 위해서인 것 같다. 첫번째 그림에서 Rotor의 위쪽 teeth에는 N극이 유도되는데, 2번째 그림에서 B의 위쪽 teeth에 N극을 만들어서 Rotor를 시계방향으로 밀어내기 때문이다.
만약 B의 전류가 반대 방향으로 흘렀다면 Rotor가 시계 반대 방향으로 회전하였을 것으로 생각된다.
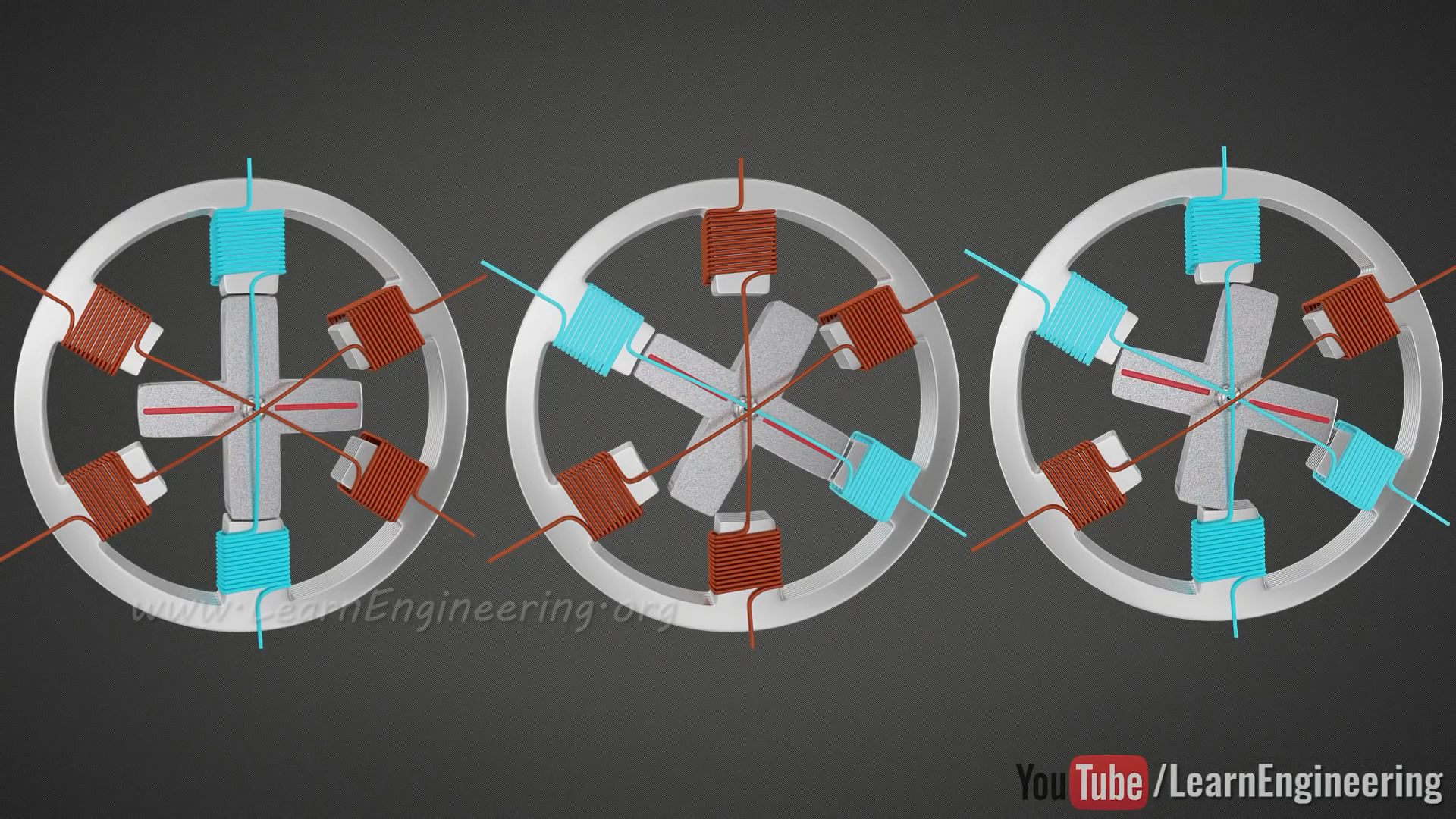
기존에 전류를 A → B 로 하나씩 흘려주었다면, A → A,B → B 와 같은 식으로 중간에 두개의 Stator teeth 모두에 전류를 흘려주면 Rotor가 A와 B에 전류를 흘려주었을 때의 중간에 위치하게 되면서 조금 더 세밀한 컨트롤이 가능해진다. 결론적으로 위와 같은 방식으로 전류를 흘려주면 $15^\circ$씩 회전하게 된다.
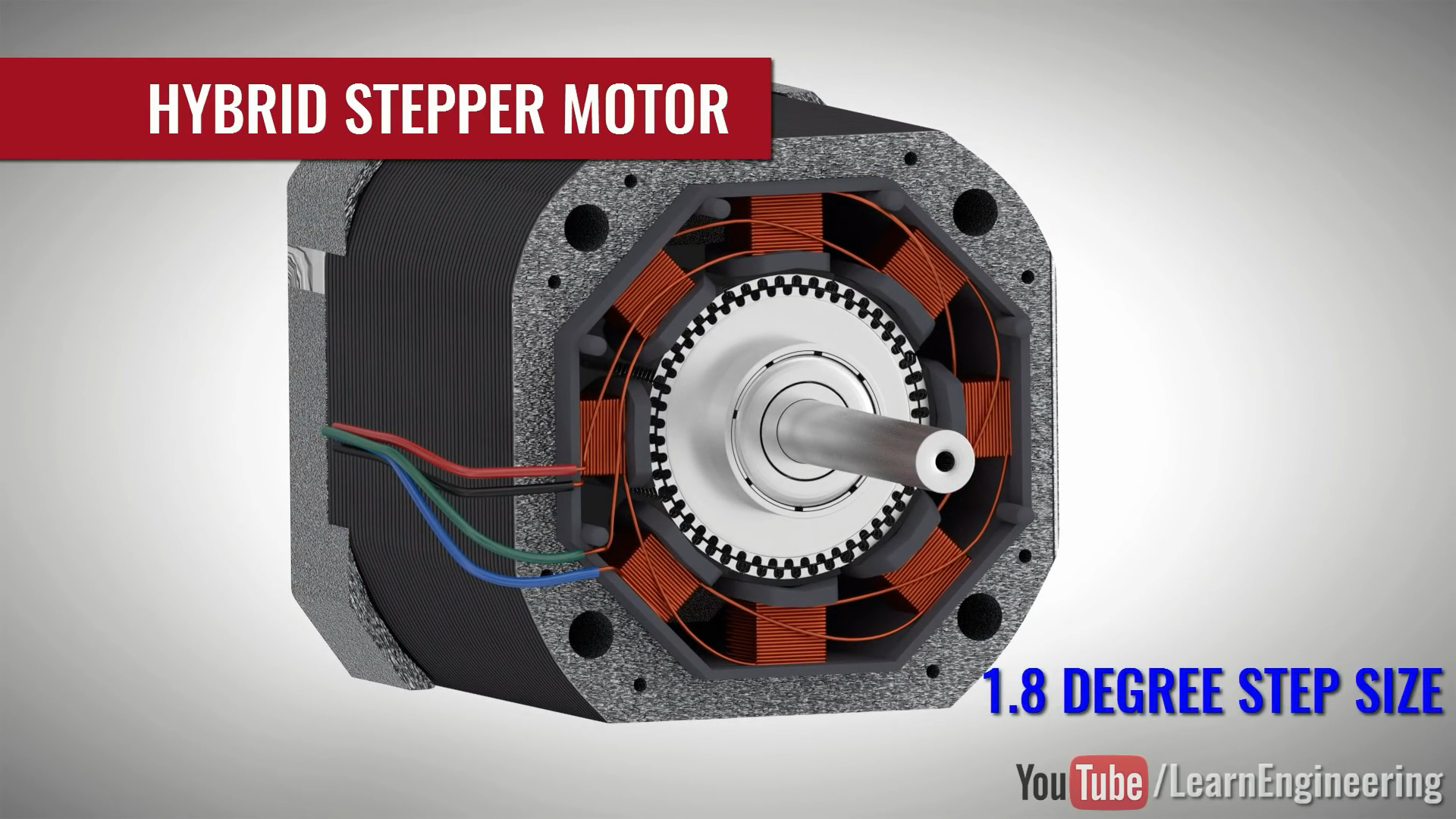
실제로 가장 활용도가 높고 일반적으로 사용되는 Stepper motor는 Hybrid motor 방식이다. Stepper motor의 두가지 기본 유형인 PM(Permanet Magnet) 방식과 VR(Variable Reluctance) 방식의 특성을 결합하였기에 Hybrid 방식이라 부른다. PM 방식은 Rotor에 영구 자석이 장착되어 있는 반면 VR 방식은 자석이 없고 여러개의 teeth가 있다.
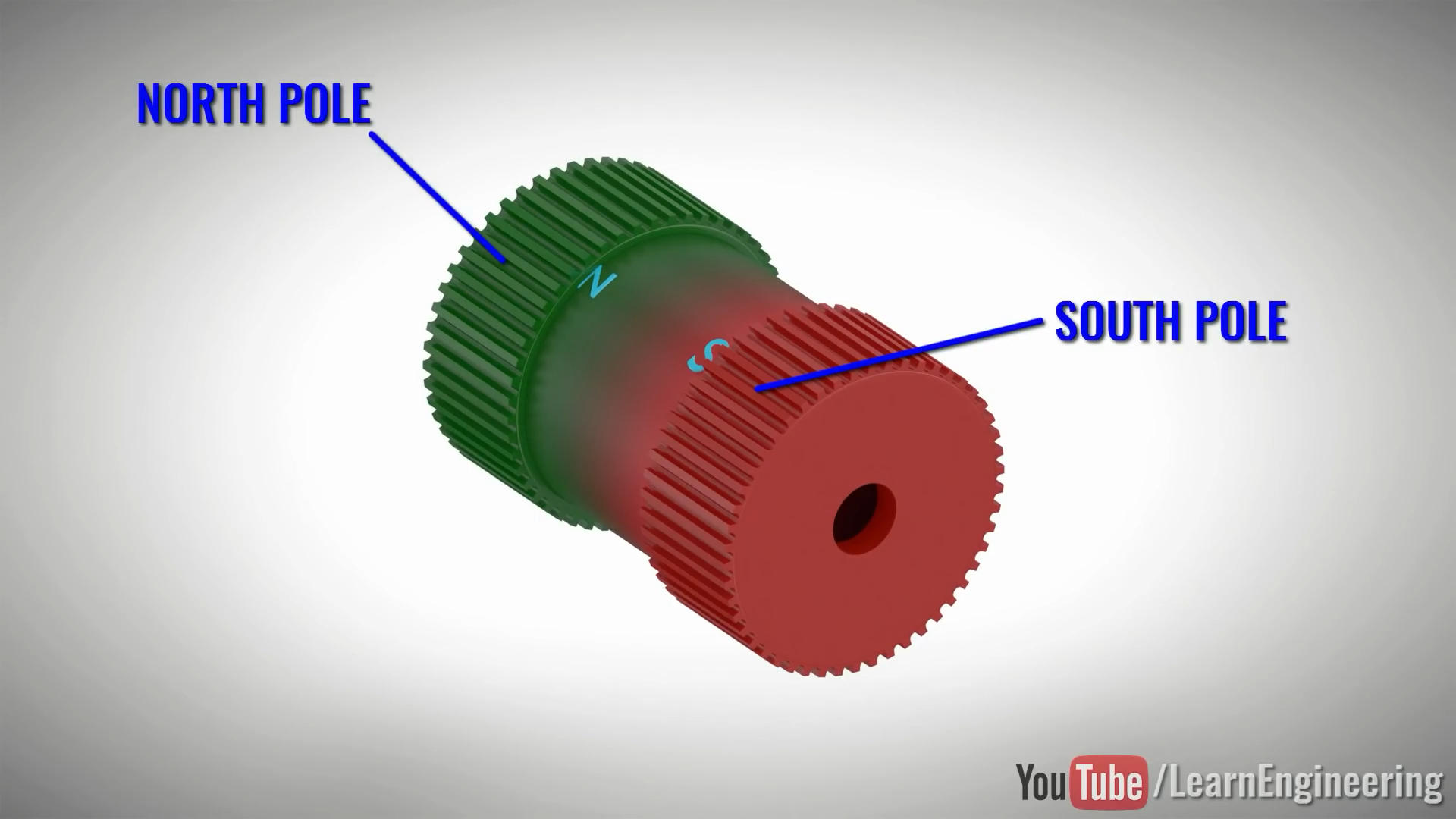
Rotor의 내부에 영구 자석을 위치시키고 그 위에 여러개의 teeth를 가지는 cap을 씌워서 각 cap이 극성을 띄도록 만든다. 이때 영구자석이 PM 방식, cap이 VR 방식의 특성임을 알 수 있다.
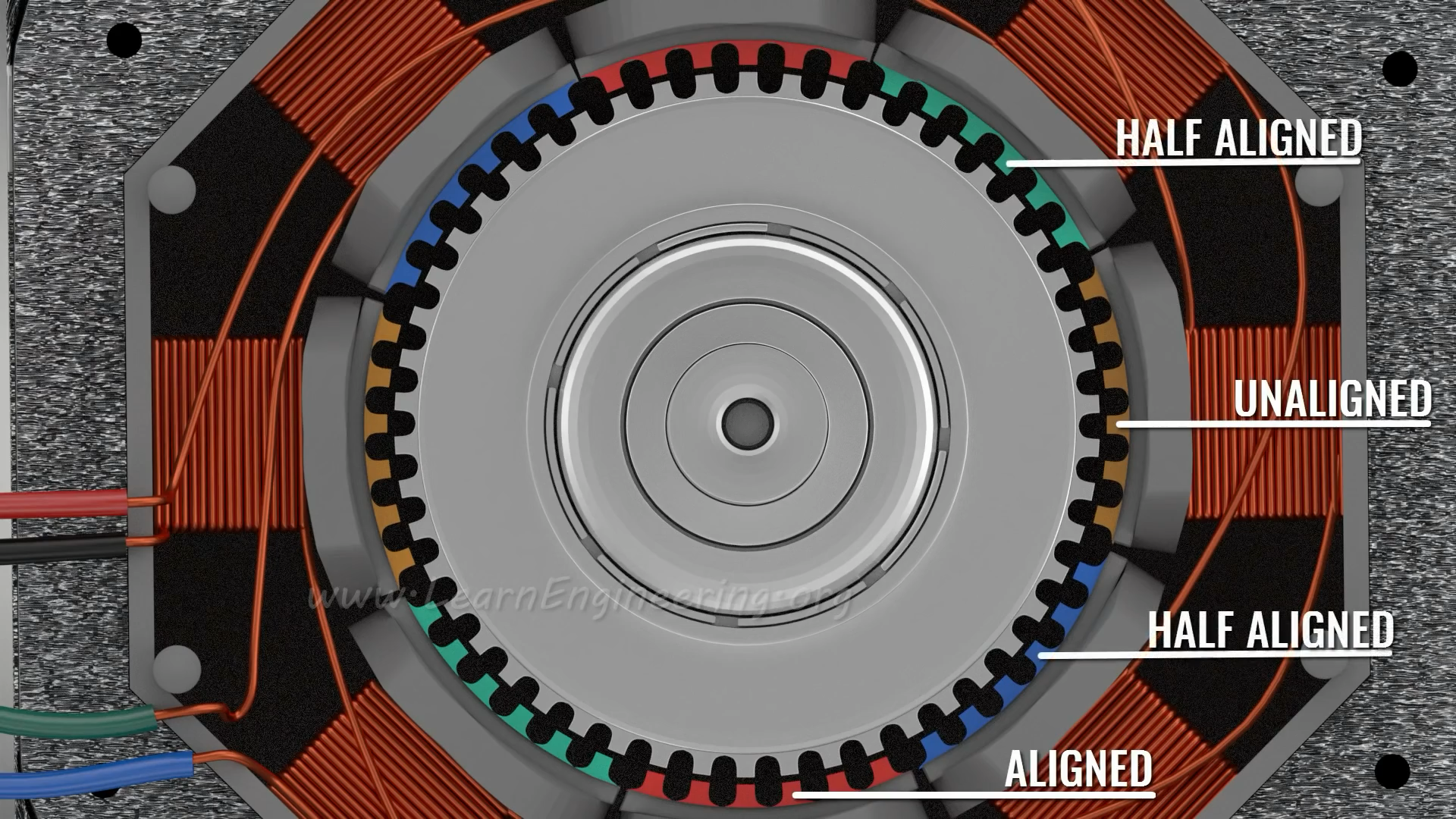
그리고 Stator에도 큰 teeth 별로 작은 teeth를 세분화하여 붙인다. Rotor의 teeth와 Stator의 teeth가 같은 극성을 가질 경우 unalign되고, 반대 극성을 가질 경우 align된다.
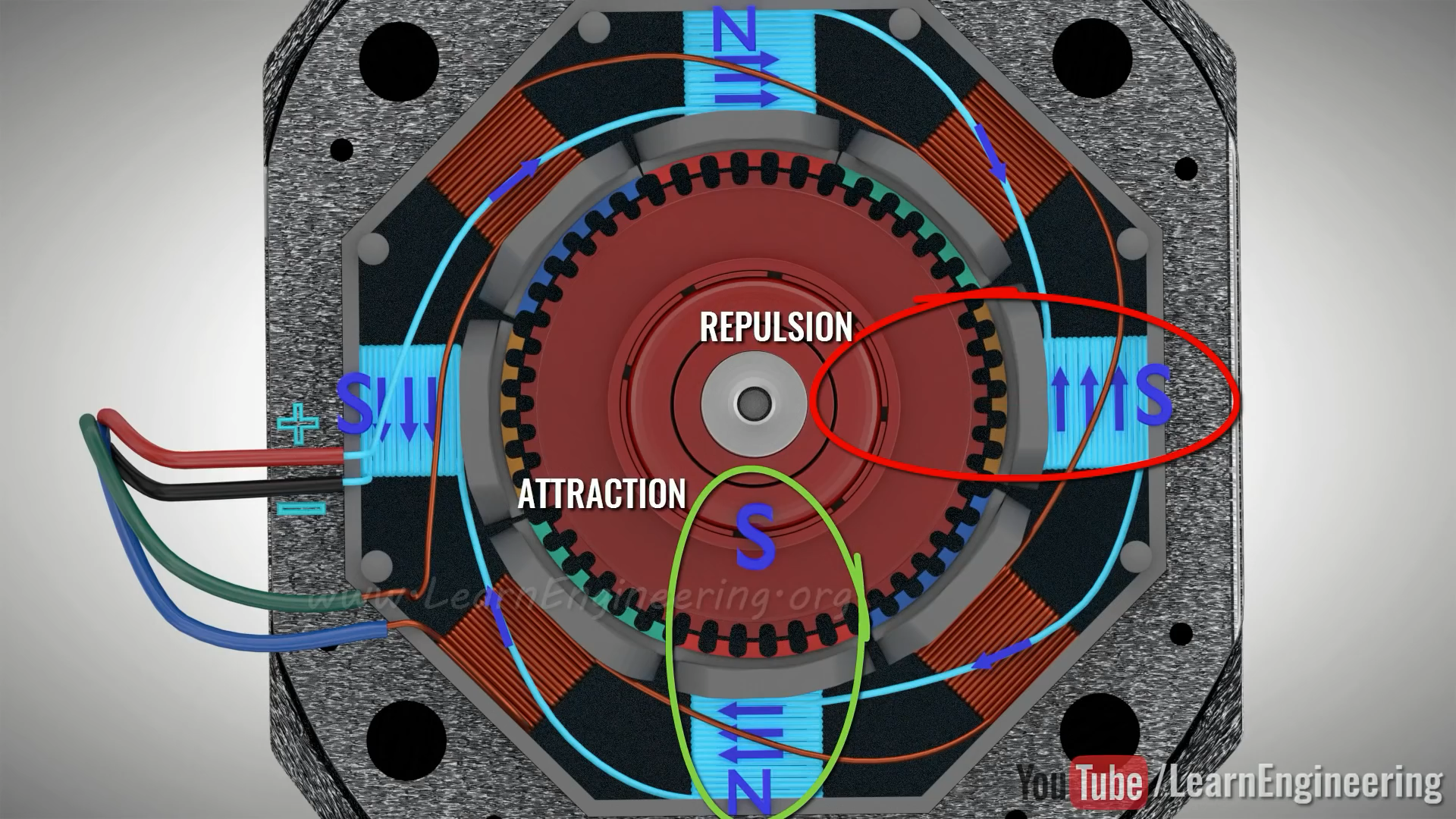
그래서 위와 같이 전류를 흘려주면 Stator teeth에 극성이 생기고, 해당 teeth의 극성이 N인 경우 Rotor와 align되고 S인 경우 unalign된다.
위 사진의 화살표 방향으로 전류가 흐르게 되면 Stator의 바깥쪽에 표시된 극성이 유도되고, 안쪽 teeth에는 표시된 극성과 반대 극성이 유도될 것 같다. 앞으로의 예시에서도 비슷한 오류가 계속 발생되니 방향은 무시하고 표시된 극으로 Stator teeth의 극성이 유도되었다고 보면 된다.
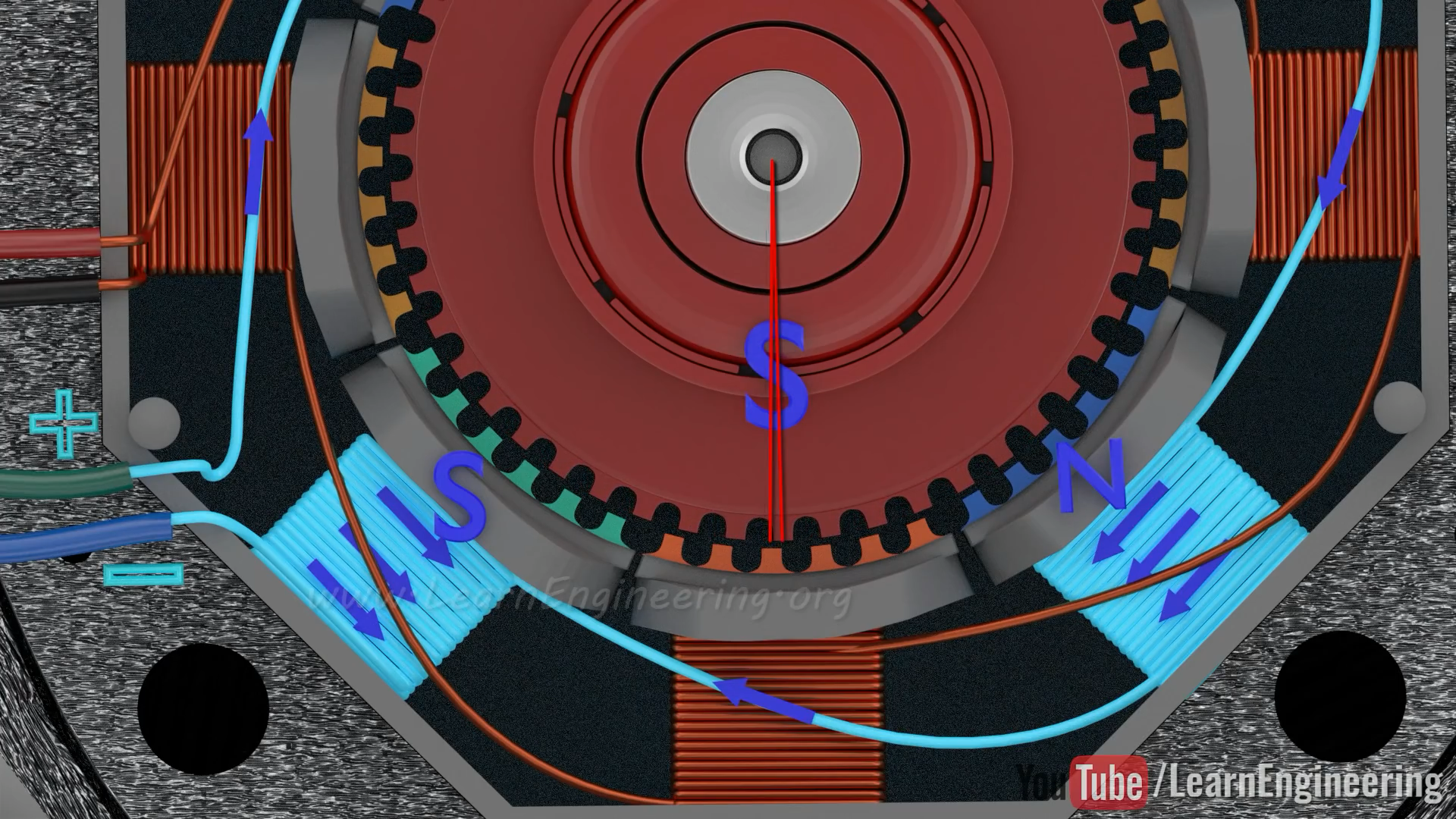
앞서 전류를 흘려보내지 않는 teeth에 전류를 흘려보내면, 유도된 극성에 맞게 Rotor가 회전하게 된다. 해당 예시에서 Rotar는 총 50개의 teeth를 가지고 Stator는 큰 teeth 하나당 작은 teeth 6개를 가지므로 총 48개의 teeth를 가진다.
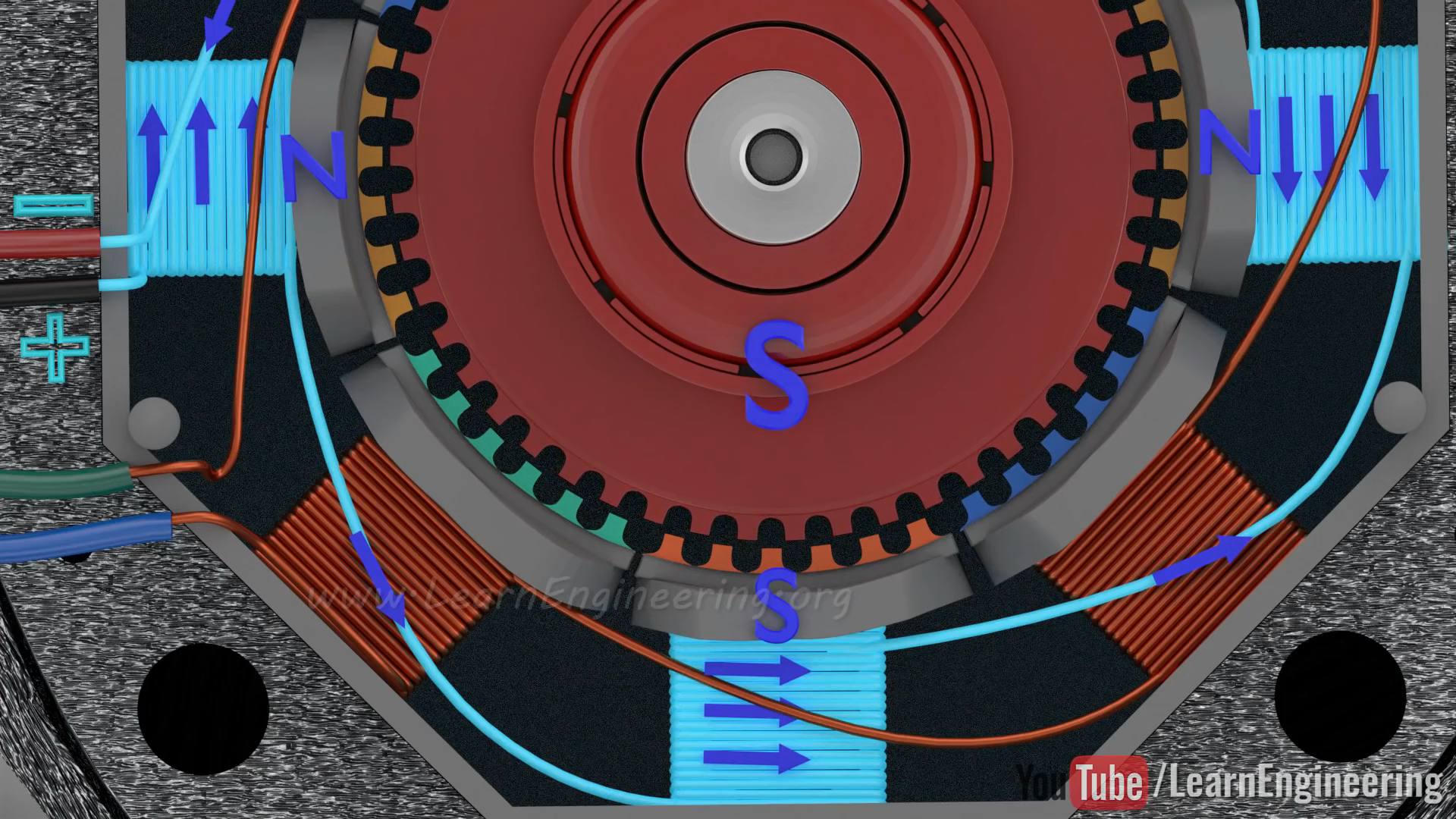
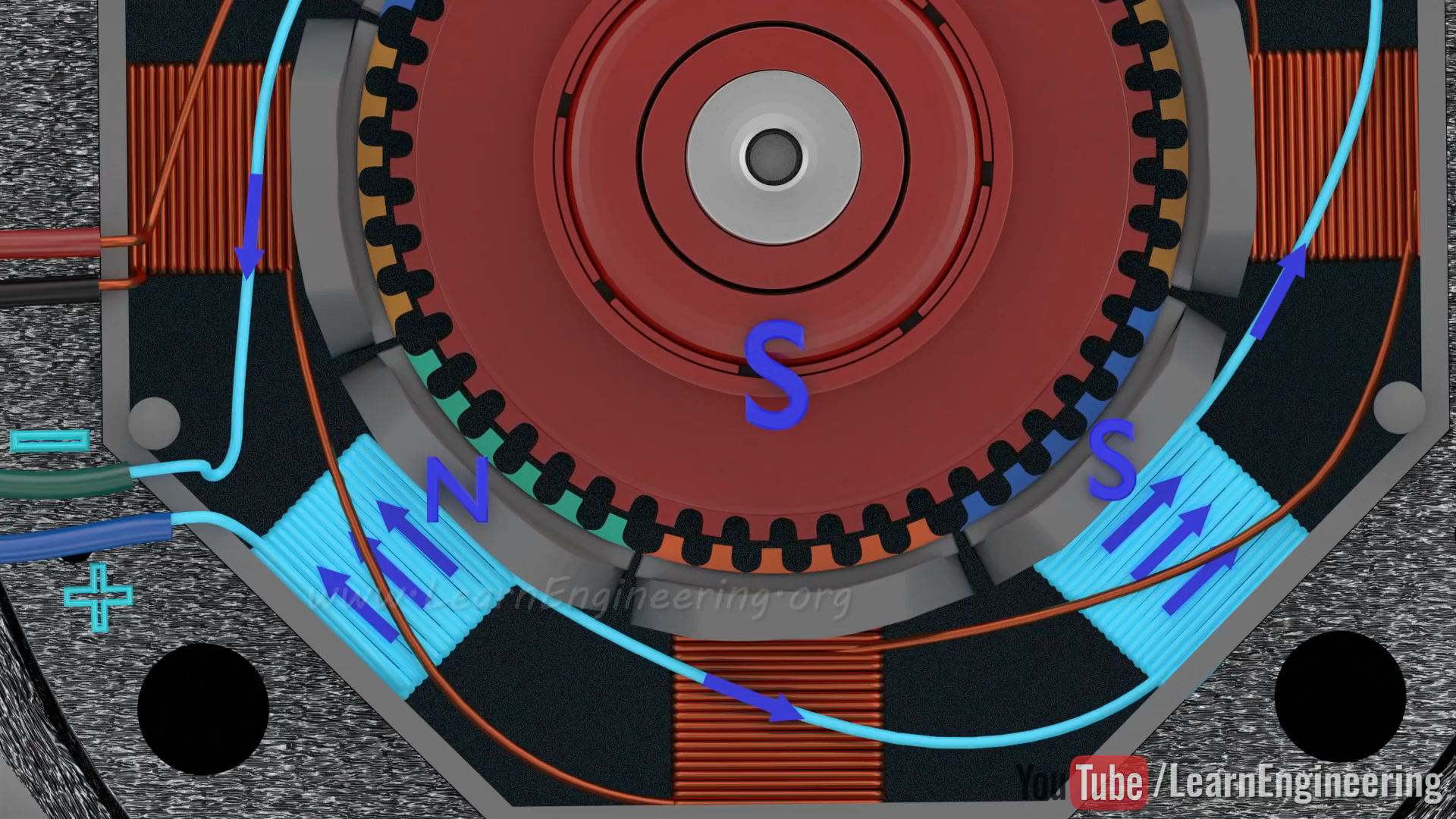
총 4번의 step을 통해 Rotor가 처음과 동일한 모양을 보인다. 그러므로 총 50개의 teeth를 가지는 Rotor가 1회 회전을 하기 위해서는 200번의 step이 필요하다. 따라서 해당 motor는 step 당 $1.8^\circ$씩 회전한다.
3. Servo motor
Servo 모터는 특정한 위치로의 이동, 속도 제어, 토크 제어가 가능한 회전형 Actuator이다.
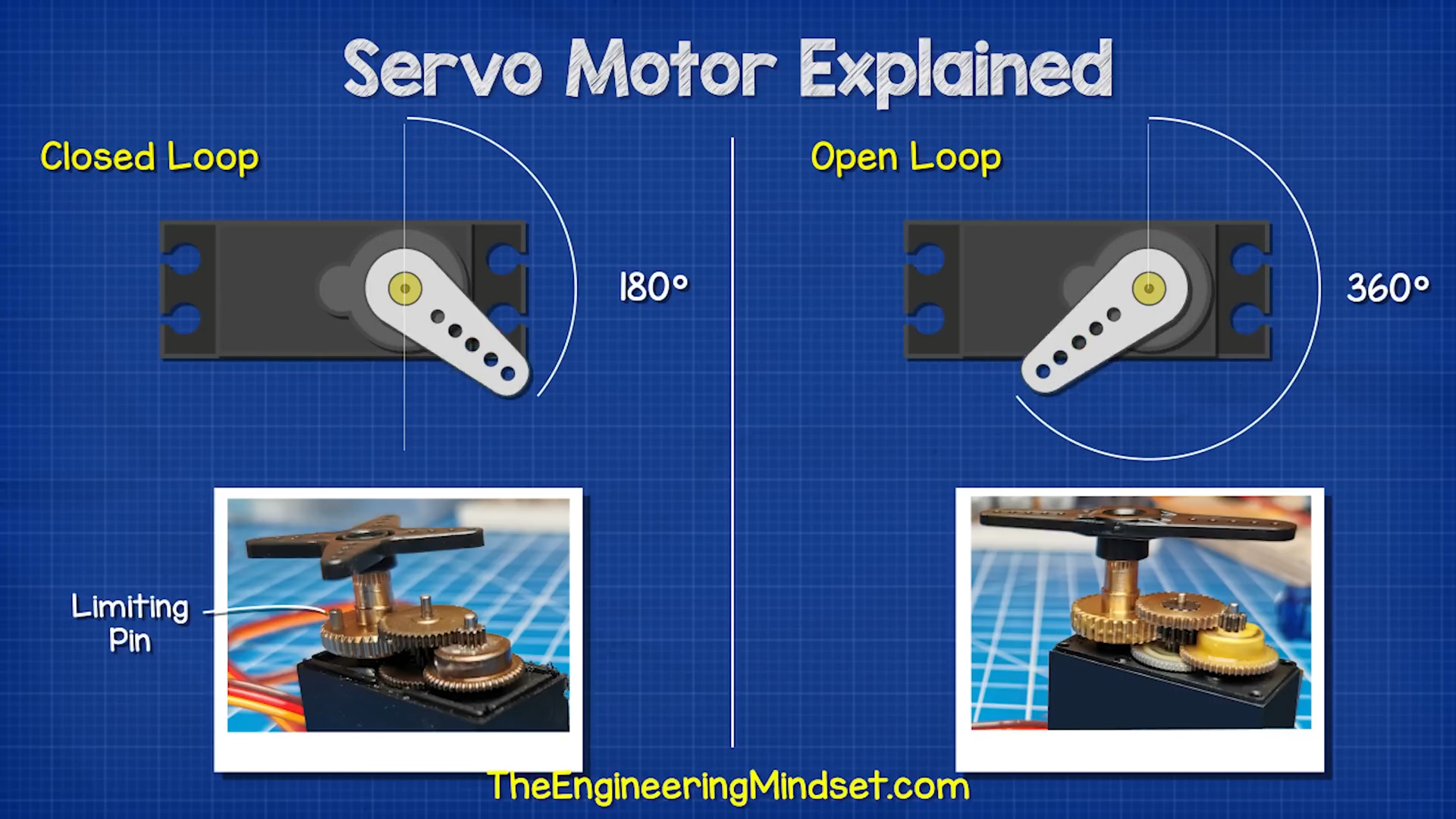
물리적인 pin을 위치하여 일정 각도 내에서만 회전할 수 있는 closed loop 방식과 제한 없이 회전할 수 있는 open loop 방식이 있다.
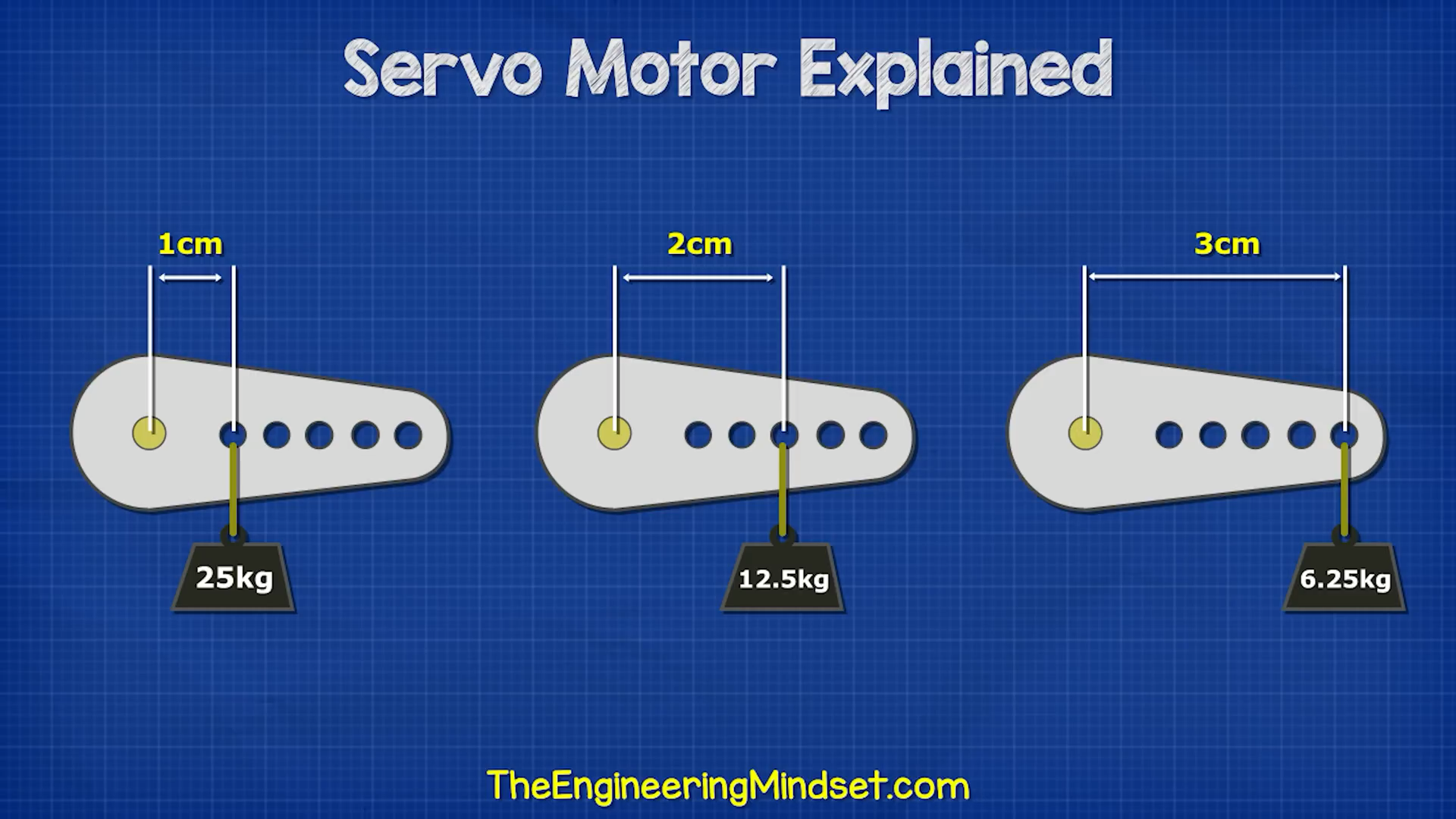
모터에 표시되어 있는 25kg-cm라는 단위는 축으로부터 떨어져있는 거리에 따라 지탱할 수 있는 무게를 의미한다. 즉 1cm 떨어져있을 때는 25kg까지 지탱이 가능하지만, 2cm 떨어져있을 때는 12.5kg만 지탱이 가능하다.
위 그림에서 우측 예시는 3cm가 아닌 4cm이다.
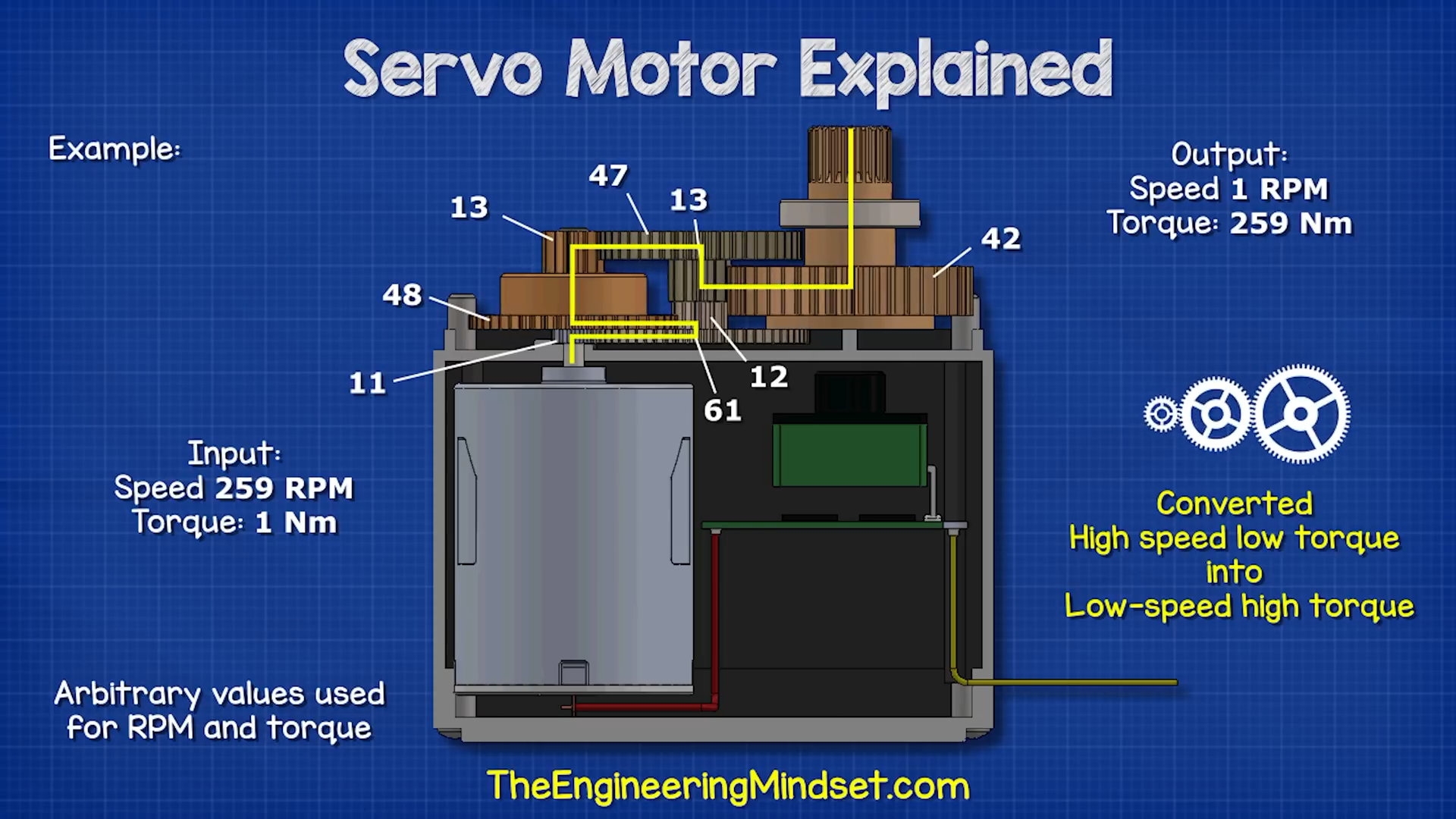
Servo 모터는 위와 같이 빠른 회전속도와 낮은 토크를 가지는 모터를 느린 회전속도와 높은 토크를 가지도록 변환해준다. 이때 output 하단에 위치한 초록색 장치가 Potentiometer로 위치 패드백을 제공하는 데 사용된다.
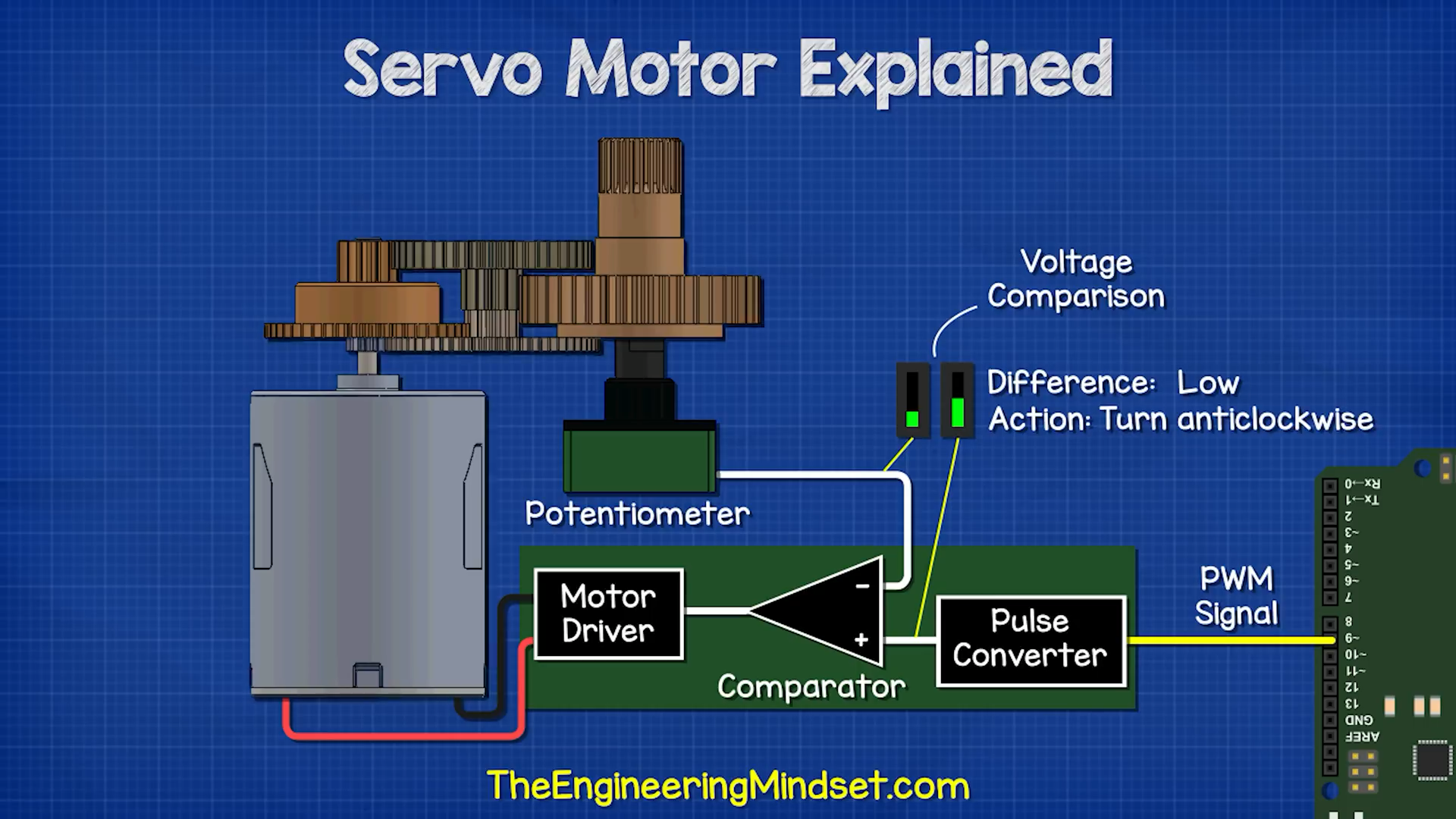
Potentiometer에 연결된 output 기어 위 위치에 따라 전기적 저항이 변하고, 이 저항이 아날로그 전압 신호로 변환된다. 이 전압 신호와 목표 위치를 비교하여 제어 시스템에서 모터의 움직임을 조절하는 데 사용된다.
Gear Train Calculations
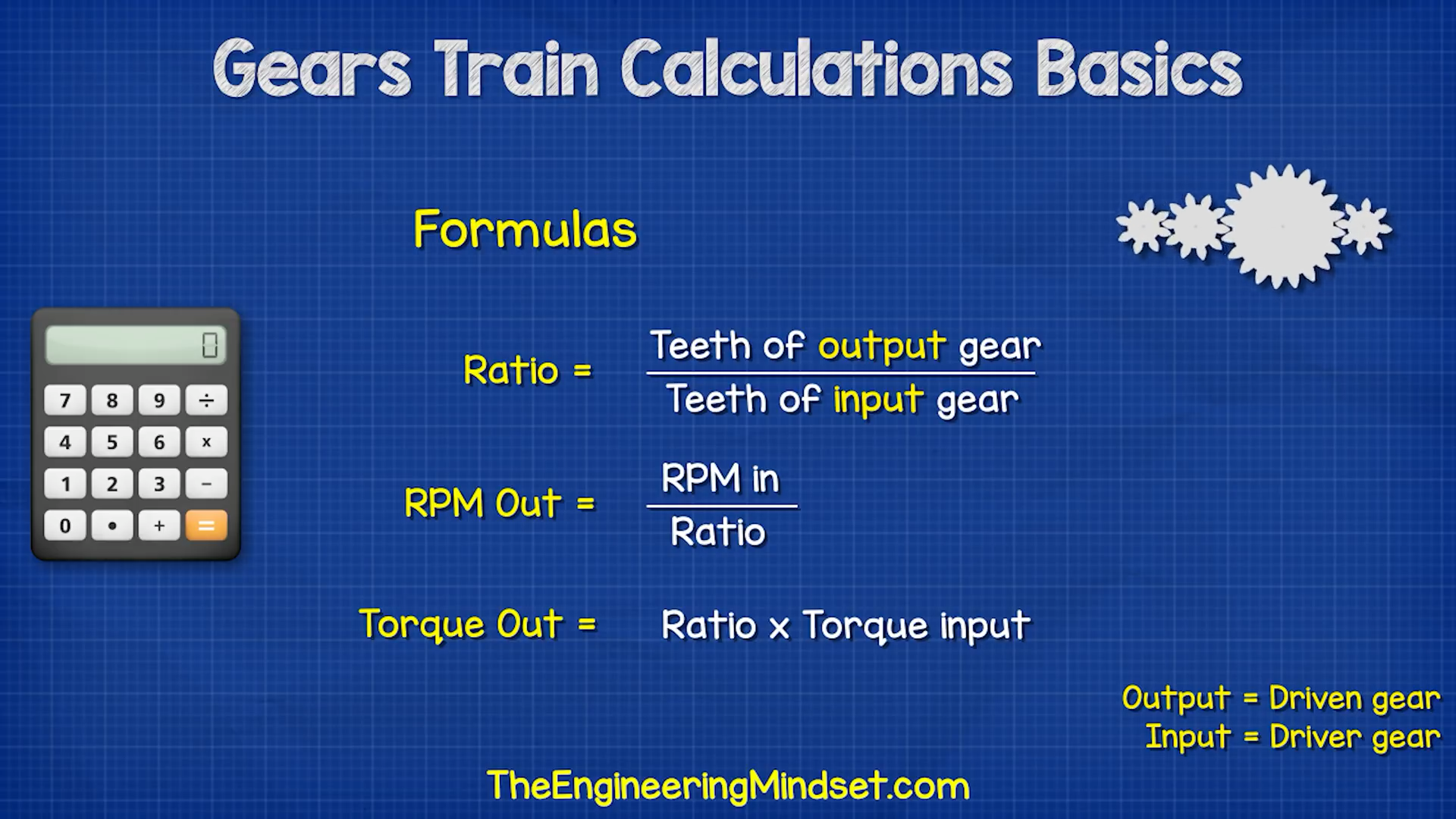
Gears가 물려있을 때 input gear와 output gear 사이의 관계는 위와 같다. 위 식에서 RPM Out과 Torque Out의 곱은 RPM In과 Torque In의 곱과 같으므로, gear train에 single gear만 연결되어 있을 경우 최종 output의 RPM과 Torque의 곱은 처음 input의 RPM과 Torque의 곱과 같다.
Single gear란 하나의 축에 두개 이상의 gear가 결합되지 않고, 각 gear가 독립적으로 하나의 축에 배치되어 있는 것이다.
반대로 Compound gear란 두개 이상의 기어가 한 축 위에 결합되어 있는 것을 의미한다.
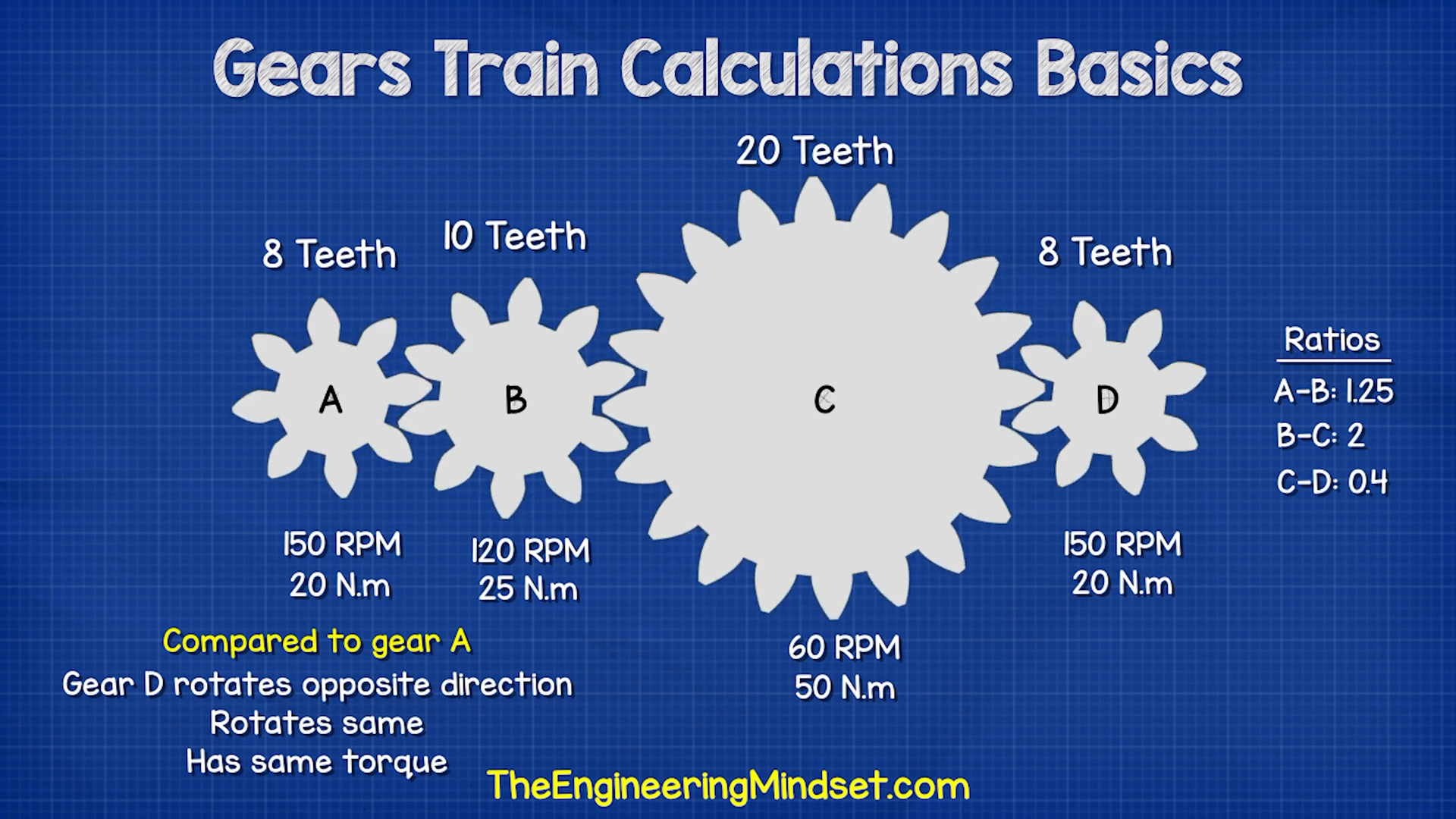
위와 같이 Input/Output teeth 수의 비율에 따라 RPM과 Torque 값을 계산할 수 있다.
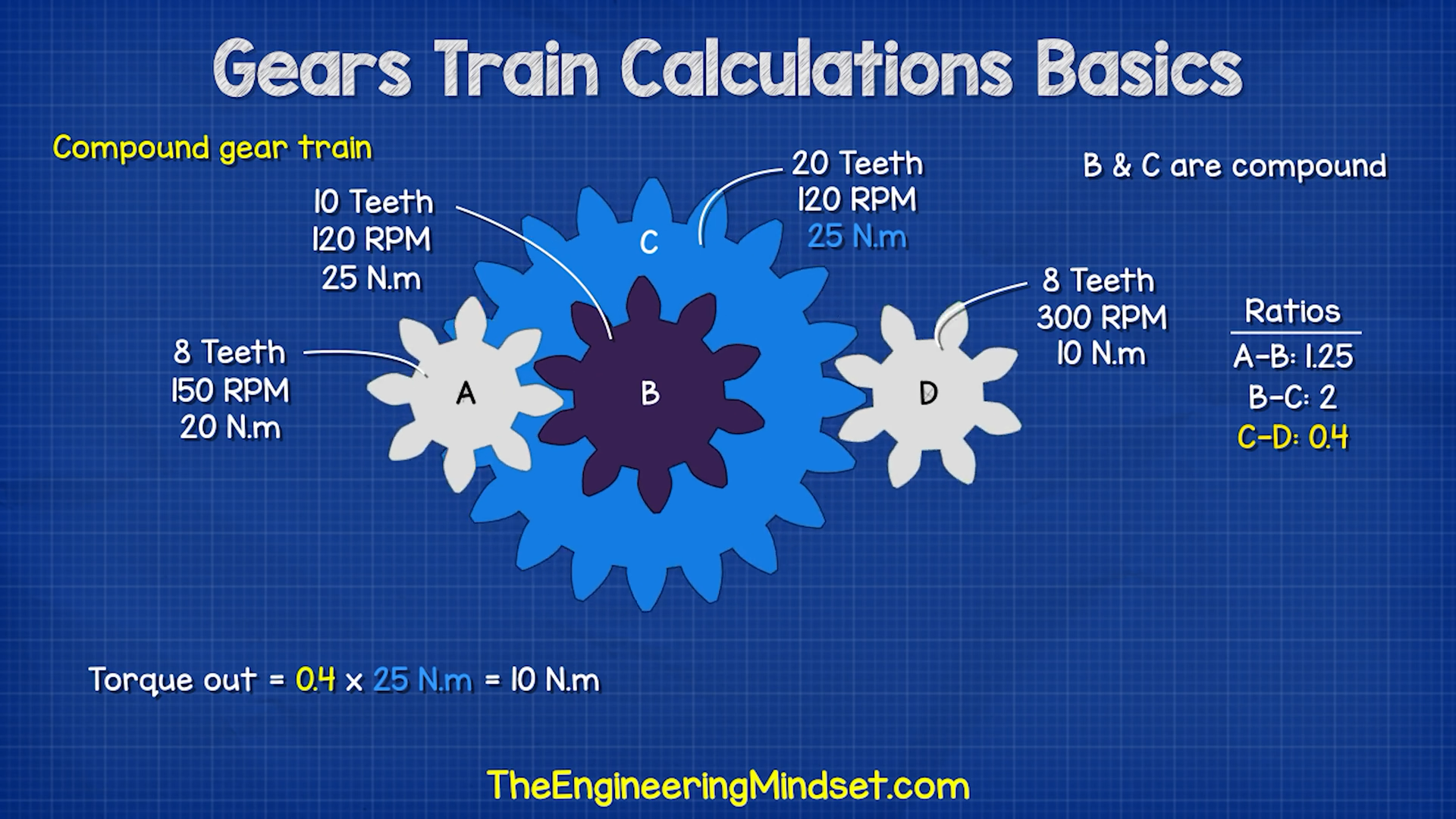
반대로 compound gear가 포함되어 있을 경우에는 최종 output의 RPM과 Torque의 곱은 처음 input의 RPM과 Torque의 곱이 같음을 보장하지 못한다. 위에서 B와 C gear는 같은 축에서 회전하기 때문에 동일한 RPM과 Torque 값을 가진다. 그러므로 compound gear가 포함된 gear train에서는 계산에 유의해야 한다.